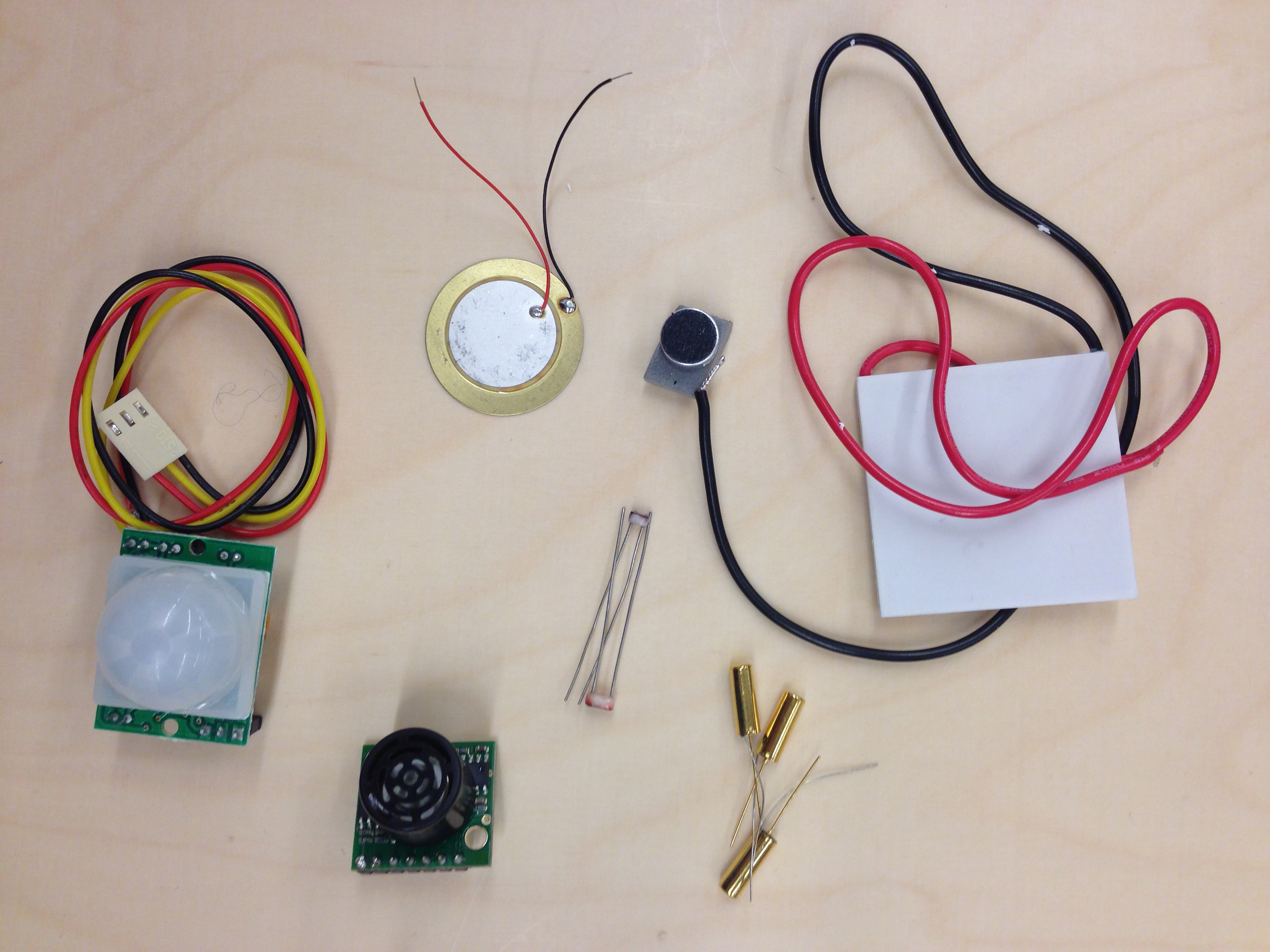
Following up to testing all the sensors, our team custom made a steering wheel that controlled a game developed by Ayanna. The player drives a car and tries to stay on the road. That’s it! The constraints of the project was that we had to spend less than four dollars on materials and that we had to use only the sensors provided by Kaho. We created the wheel out of two plastic plates with two tilt sensors, a sonar sensor, and the Flora. Two holes were cut out from the plate to ensure the player would hold it the right way, so that we can get the best readings from the tilt sensors.
I like to think of our game as the Flappy Bird of hardware games. It’s deceptively simple, but nearly impossible to win. Because the tilt sensors work more like switches. Even though we were able to get increasing and decreasing values from them, they essentially produce binary results – on or off. That makes driving a straight line extremely difficult with our wheel. Once the player makes his/her first turn, it’s impossible to go back to just driving in a straight line, because the wheel is always creating a left or right turn on the screen. One of our testers even flipped the car over while trying to steer it back to the middle of the road! What I learned from this project is that simple, impossible games are pretty addictive. Even after flipping his car over, the player still wanted to try again. The stupidly simple goal of the game makes it frustrating to players that they can’t beat it, so they keep playing. (insert evil laugh)
IMG 3987 from Jiashan Wu on Vimeo.
IMG 3988 from Jiashan Wu on Vimeo.

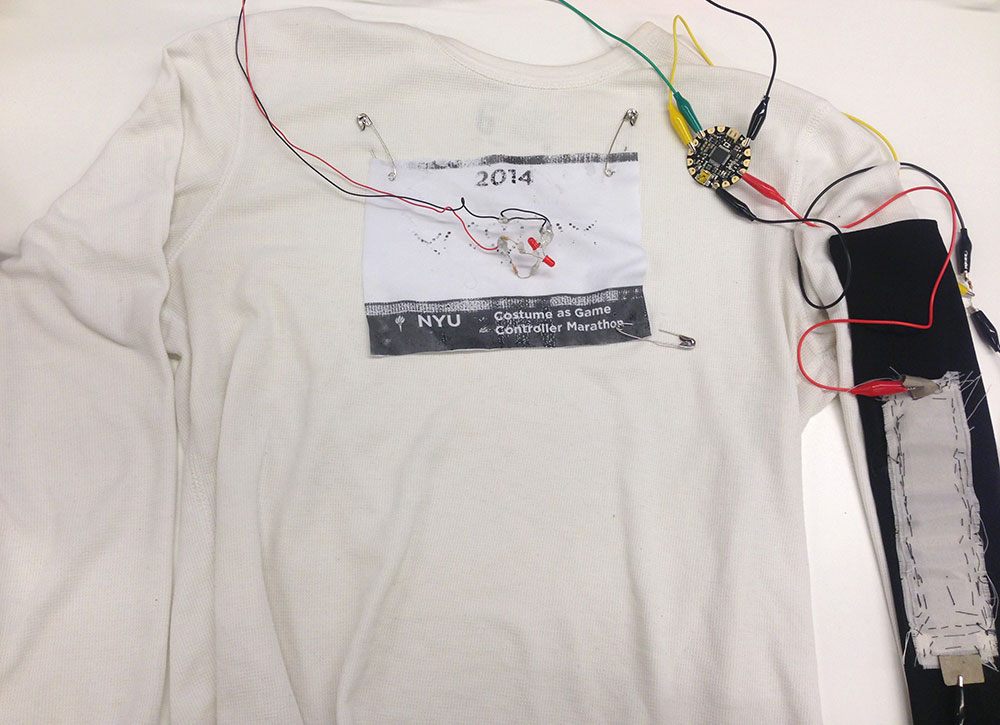
Tilt sensors between the plates.
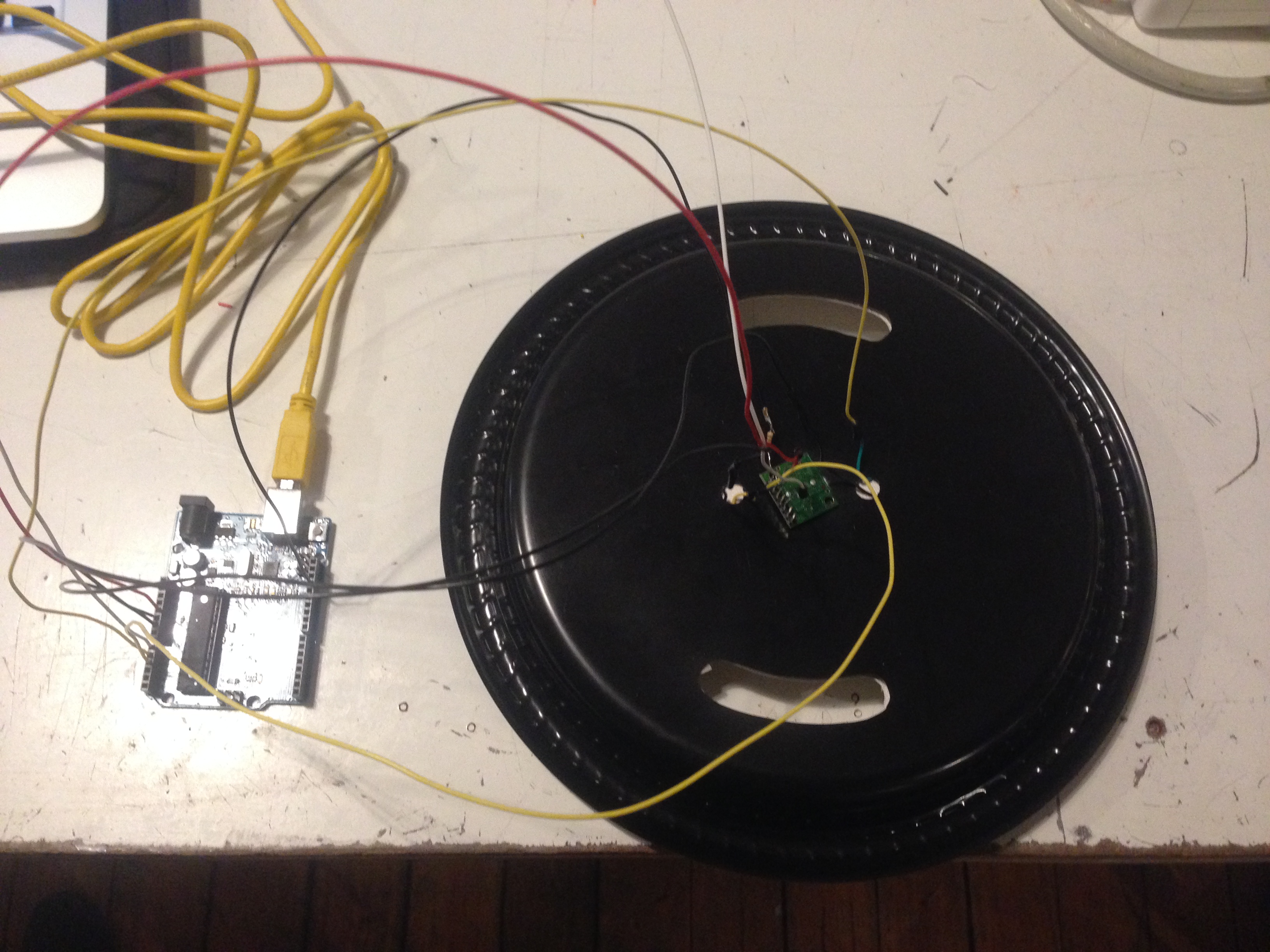
We also tried using the Arduino, because we were having issues reading the sonar values with the Flora.

We went back to the Flora because the Uno didn’t support keypress events.

Completed steering wheel!